- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

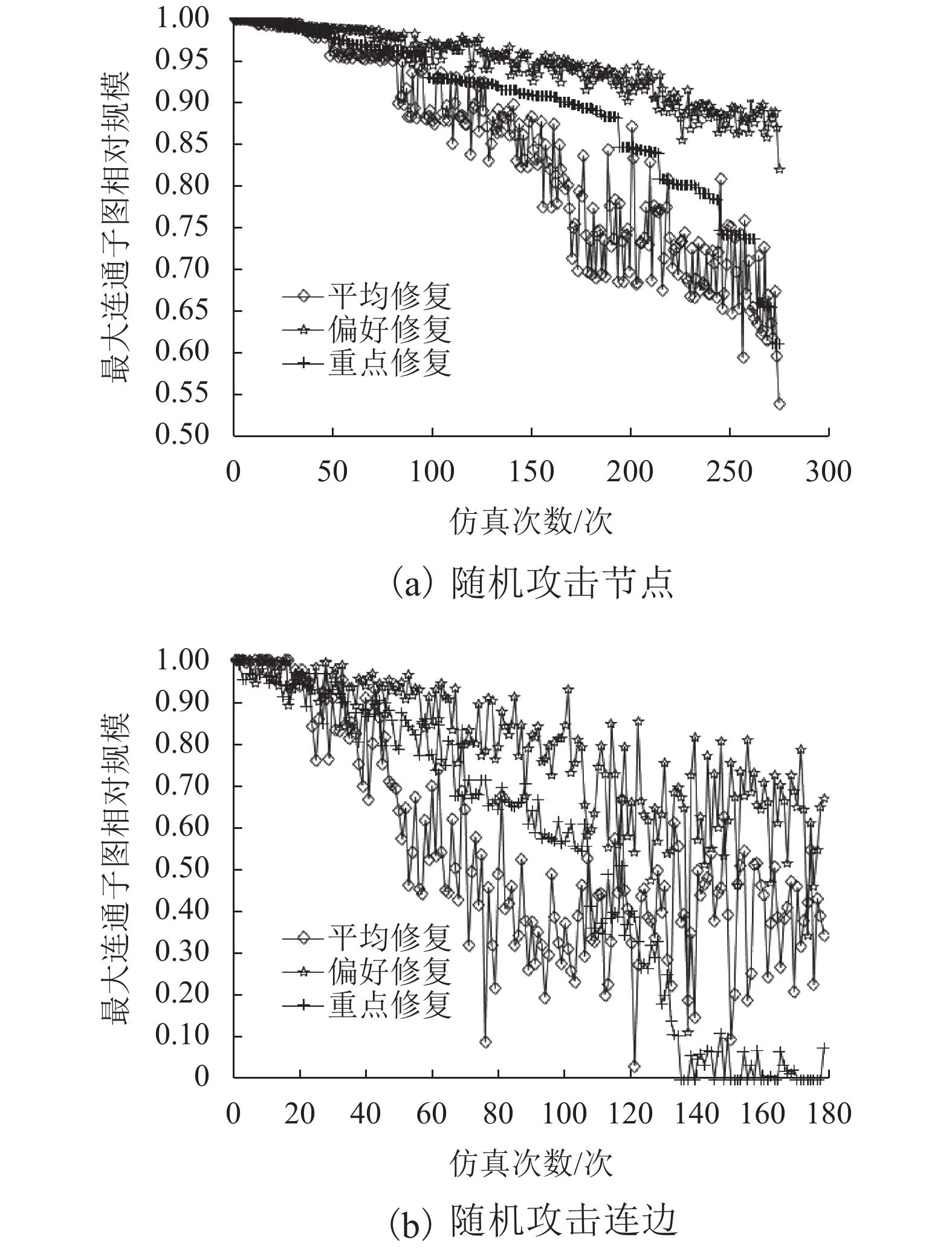
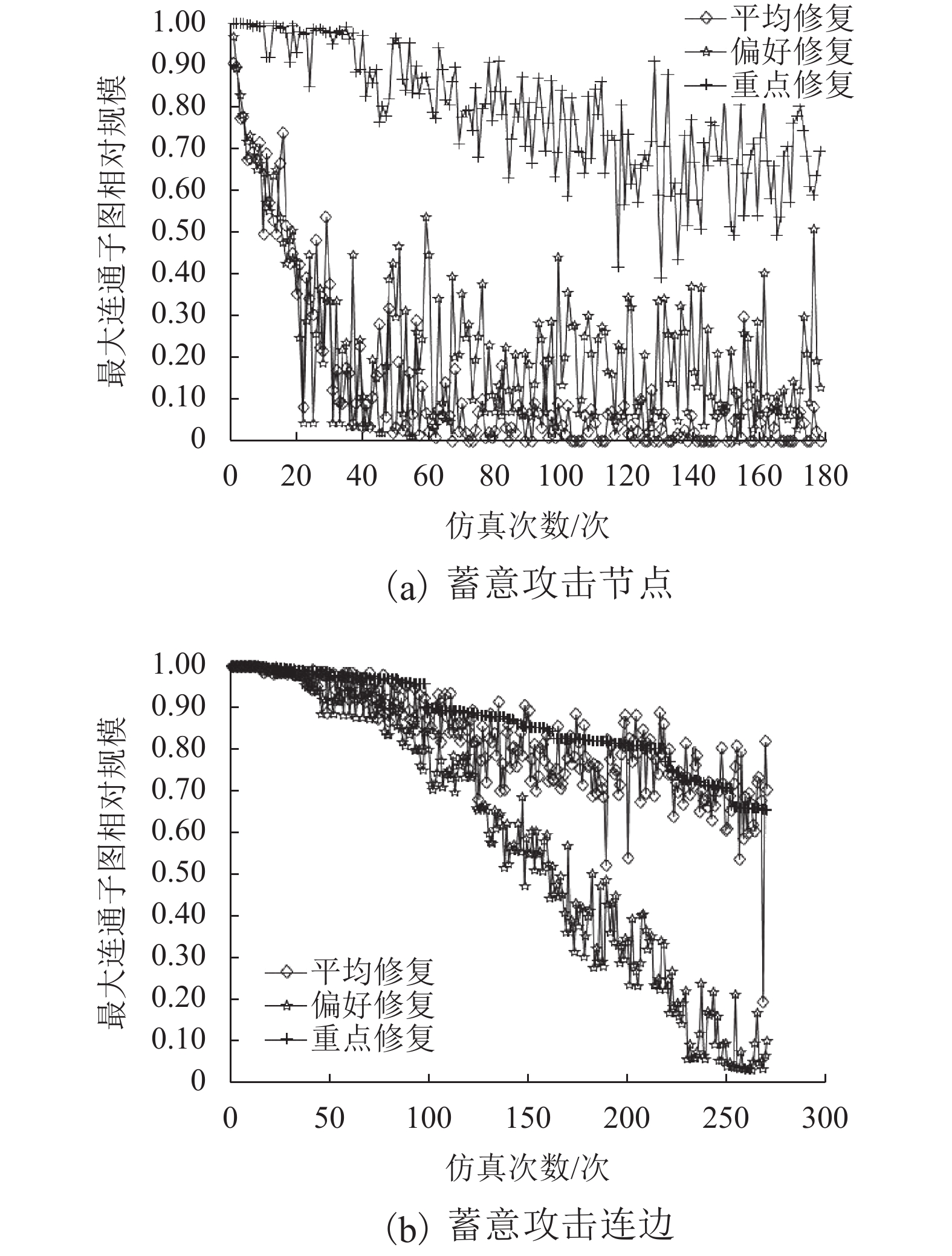
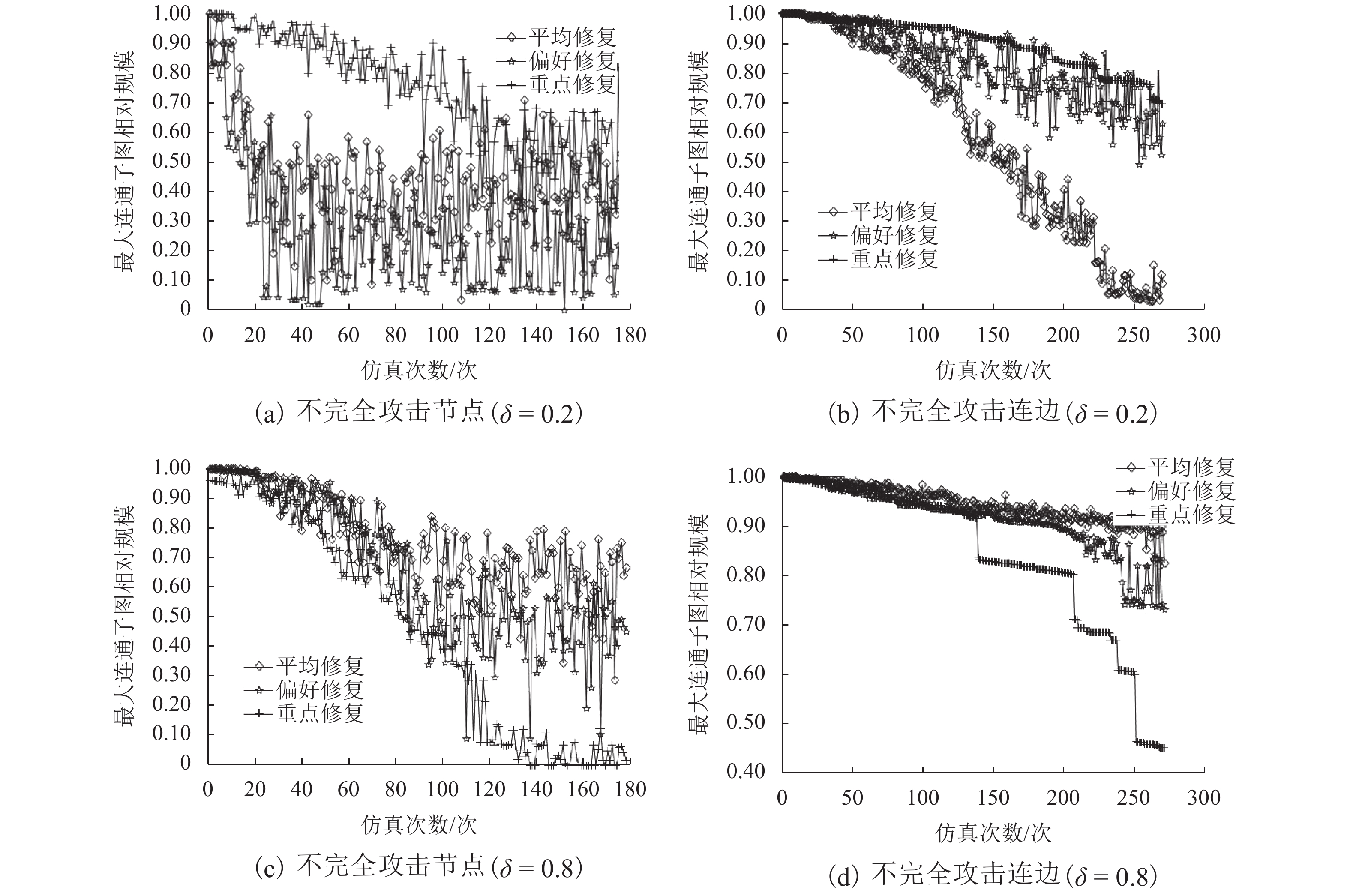
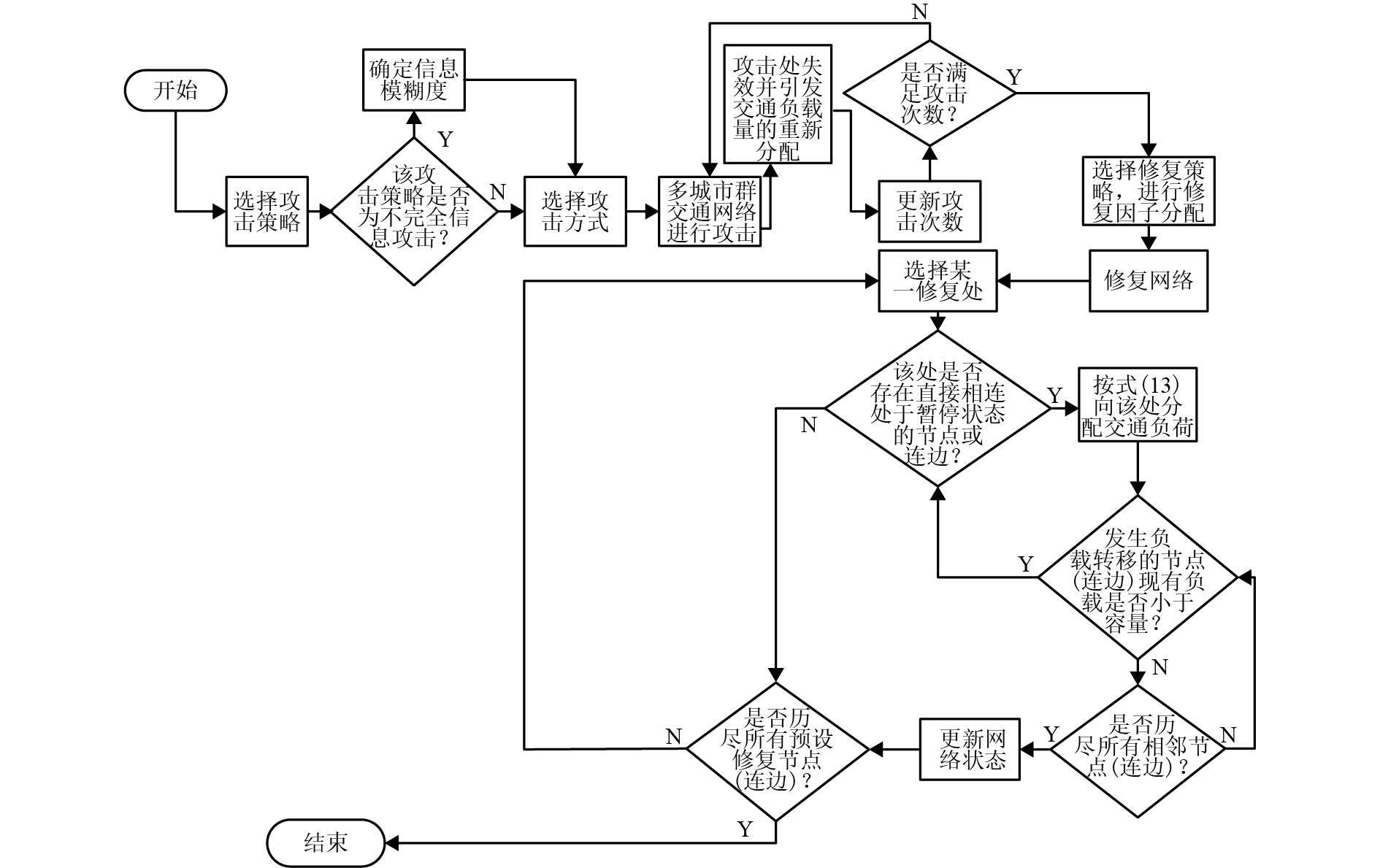
| Citation: | LI Chengbing, LI Fengxiao, WANG Luyao. Simulation of Passenger Traffic Network Reliability Restoration in Urban Agglomeration[J]. Journal of Southwest Jiaotong University, 2019, 54(2): 388-394, 401. doi: 10.3969/j.issn.0258-2724.20170813

|

|
CHI L P, YANG C B, CAI X. Stability of random networks under evolution of attack and repair[J]. Chinese Physics Letters:English Edition, 2006, 23(1): 263-266.
|
|
EDGARD J, MANOEL C P. A reversible CTMC model for availability analysis of shared mesh restoration schemes for WDM networks[J]. Journal of High Speed Networks, 2014, 20(4): 223-237.
|
|
胡斌,黎放. 多种攻击策略下无标度网络修复策略[J]. 系统工程与电子技术,2010,32(1): 86-89.
HU Bin, LI Fang. Repair strategies of scale-free networks under multifold attack strategies[J]. Systems Engineering and Electronics, 2010, 32(1): 86-89.
|
|
SEVER D, DELLAERT N, WOENDEL T, et al. Dynamic shortest path problems:hybrid routingpolicies considering network disruptions[J]. Computers and Operations Research, 2013, 40(12): 2852-2863. doi: 10.1016/j.cor.2013.06.014
|
|
程杰,刘杰,唐智慧. 城市道路网络修复策略研究[J]. 中国安全科学学报,2012,22(9): 114-120.
CHENG Jie, LIU Jie, TANG Zhihui. Study on network restoration strategy of urban road[J]. Chinese Journal of Safety Science, 2012, 22(9): 114-120.
|
|
王正武,周振宇,胡静. 基于节点修复效果的故障路网修复策略[J]. 长沙理工大学学报,2014,11(4): 25-31. doi: 10.3969/j.issn.1672-9331.2014.04.004
WANG Zhengwu, ZHOU Zhenyu, HU Jing. Evacuation strategy for failure road network based on node evacuation effect[J]. Journal of Changsha University of Science & Technology, 2014, 11(4): 25-31. doi: 10.3969/j.issn.1672-9331.2014.04.004
|
|
李周平,韩景倜,肖宇. 基于复杂分层网络的城际路网级联失效可靠性仿真[J]. 计算机应用研究,2015,32(8): 2265-2267. doi: 10.3969/j.issn.1001-3695.2015.08.005
LI Zhouping, HAN Jingchou, XIAO Yu. Cascading failure reliability simulation of intercity road network based on complex hierarchical network[J]. Computer Application Research, 2015, 32(8): 2265-2267. doi: 10.3969/j.issn.1001-3695.2015.08.005
|
|
郑亚晶,张星臣,徐彬,等. 铁路路网运输能力可靠性研究[J]. 交通运输系统工程与信息,2011,11(4): 16-21. doi: 10.3969/j.issn.1009-6744.2011.04.003
ZHENG Yajing, ZHANG Xingchen, XU Bin, et al. Carrying capacity reliability of railway networks[J]. Journal of Transportation Systems Engineering and Information Technology, 2011, 11(4): 16-21. doi: 10.3969/j.issn.1009-6744.2011.04.003
|
|
徐凤,朱金福,苗建军. 基于复杂网络的空铁复合网络的鲁棒性研究[J]. 复杂系统与复杂性科学,2015,12(1): 40-45.
XU Feng, ZHU jinfu, MIAO Jianjun. Research on robustness of air iron complex network based on complex network[J]. Complex Systems and Complexity Science, 2015, 12(1): 40-45.
|
|
董治,吴兵,王艳丽,等. 中国城市群交通系统发展特征研究[J]. 中国公路学报,2011,24(2): 83-88. doi: 10.3969/j.issn.1001-7372.2011.02.014
DONG Zhi, WU Bing, WANG Yanli, et al. Research on development characteristics of urban agglomerations transportation system in China[J]. China Journal of Highway and Transport, 2011, 24(2): 83-88. doi: 10.3969/j.issn.1001-7372.2011.02.014
|
|
李成兵,魏磊,郝羽成. 城市群复合交通网络特性研究[J]. 系统仿真学报,2016,28(12): 2958-2965.
LI Chengbing, WEI Lei, HAO Yucheng. Research on characteristics of city agglomeration compound traffic network[J]. Journal of System Simulation, 2016, 28(12): 2958-2965.
|
|
刘超. 城市慢行交通网络构建方法研究[D]. 成都: 西南交通大学, 2014
|
|
李成兵,郝羽成,王文颖. 城市群复合交通网络可靠性研究[J]. 系统仿真学报,2017,29(3): 565-580.
LI Chengbing, HAO Yücheng, WANG Wenying. Research on the reliability of urban agglomeration complex transportation network[J]. Journal of System Simulation, 2017, 29(3): 565-580.
|
|
李成兵,魏磊,李奉孝,等. 基于攻击策略的城市群复合交通网络脆弱性研究[J]. 公路交通科技,2017,34(3): 101-104.
LI Chengbing, WEI Lei, LI Fengxiao, et al. Study on vulnerability of city agglomeration compound traffic network based on attack strategy[J]. Journal of Highway and Transportation Research and Development, 2017, 34(3): 101-104.
|
|
董文,方向,范磊,等. 基于斯坦纳树的雷场网络大面积损坏修复策略[J]. 兵工学报,2013,34(2): 197-202.
DONG Wen, FANG Xiang, FAN Lei, et al. A Steiner tree-based strategy for repairing large-scale demaged minefield network[J]. Acta Armam, 2013, 34(2): 197-202.
|
|
种鹏云,帅斌,陈钢铁. 恐怖袭击下危险品运输网络级联失效抗毁性建模与仿真[J]. 计算机应用研究,2013,30(1): 107-110. doi: 10.3969/j.issn.1001-3695.2013.01.025
ZHONG Pengyun, SHUAI Bin, CHEN Gangtie. Modeling and simulation of cascading failure and invulnerability of hazardous materials transportation network under terrorist attack[J]. Computer Application Research, 2013, 30(1): 107-110. doi: 10.3969/j.issn.1001-3695.2013.01.025
|
Figures(4)



 DownLoad:
DownLoad: