- ISSN 0258-2724
- CN 51-1277/U
- EI Compendex
- Scopus
- Indexed by Core Journals of China, Chinese S&T Journal Citation Reports
- Chinese S&T Journal Citation Reports
- Chinese Science Citation Database

| Citation: | YANG Yongqing, YANG Deng, YU Qu. Fuzzy Comprehensive Evaluation of Bridge Reinforcement Scheme Based on Uncertain AHP[J]. Journal of Southwest Jiaotong University, 2019, 54(2): 219-226. doi: 10.3969/j.issn.0258-2724.20170227

|

|
马建,孙守增,杨琦,等. 中国桥梁工程学术研究综述2014[J]. 中国公路学报,2014,27(5): 1-96. doi: 10.3969/j.issn.1001-7372.2014.05.001
MA Jian, SUN Shouzeng, YANG Qi, et al. Review on China’s bridge engineering research:2014[J]. China Journal of Highway and Transport, 2014, 27(5): 1-96. doi: 10.3969/j.issn.1001-7372.2014.05.001
|
|
姜禹,郝伟. 基于赋权关联度法的桥梁加固方案优选研究[J]. 铁道科学与工程学报,2016,13(7): 1318-1322.
JIANG Yu, HAO Wei. Research on bridge reinforcement scheme optimization based on empowerment relational degree[J]. Journal of Railway Science and Engineering, 2016, 13(7): 1318-1322.
|
|
王永平,张宝银,张树仁. 桥梁使用性能模糊评估专家系统[J]. 中国公路学报,1996,9(2): 62-67.
WANG Yongping, ZHANG Baoyin, ZHANG Shuren. Expert system for comprehensive assessment to bridge service property using fuzzy theory[J]. China Journal of Highway and Transport, 1996, 9(2): 62-67.
|
|
林拥军,邱秀姣,葛宇东. 砌体结构安全性模糊层次综合评价方法[J]. 西南交通大学学报,2016,51(6): 1214-1221. doi: 10.3969/j.issn.0258-2724.2016.06.023
LIN Yougjun, QIU Xiujiao, GE Yudong. Fuzzy comprehensive evaluation method for masonry structure safety[J]. Journal of Southwest Jiaotong University, 2016, 51(6): 1214-1221. doi: 10.3969/j.issn.0258-2724.2016.06.023
|
|
张鹏. 桥梁加固方案的层次分析优选法[J]. 公路交通科技,2006,23(7): 92-95. doi: 10.3969/j.issn.1002-0268.2006.07.022
ZHANG Peng. Choice of optimum scheme for bridge strengthening by using analytic hierarchy process[J]. Journal of Highway and Transportation Research and Development, 2006, 23(7): 92-95. doi: 10.3969/j.issn.1002-0268.2006.07.022
|
|
杨雅勋,李子春,李子青. 基于组合权值灰关联法的旧桥加固方案评价[J]. 长安大学学报 (自然科学版),2007,27(5): 62-65. doi: 10.3321/j.issn:1671-8879.2007.05.014
YANG Yaxun, LI Zichun, LI Ziqing. Evaluation on reinforcement scheme of existing bridges based on combination-weight-gray-relation method[J]. Journal of Chang’ an University (Natural Science Edition), 2007, 27(5): 62-65. doi: 10.3321/j.issn:1671-8879.2007.05.014
|
|
边晶梅,朱浮声,白泉. 组合赋权简化ELECT RE法优选桥梁加固方案[J]. 公路交通科技,2008,25(12): 132-137. doi: 10.3969/j.issn.1002-0268.2008.12.026
BIAN Jingmei, ZHU Fusheng, BAI Quan. Opti mization of bridge reinforcement scheme with si simplified electre method based on combination weighting[J]. Journal of Highway and Transporta tion Research and Development, 2008, 25(12): 132-137. doi: 10.3969/j.issn.1002-0268.2008.12.026
|
|
徐泽水. 关于层次分析中几种标度的模拟评估[J]. 系统工程理论与实践,2000,20(7): 58-62. doi: 10.3321/j.issn:1000-6788.2000.07.012
XU Zeshui. A simulation-based evaluation of several scales in the analytic hierarchy process[J]. Systems Engineering-Theory & Practice, 2000, 20(7): 58-62. doi: 10.3321/j.issn:1000-6788.2000.07.012
|
|
张彩然,朱尔玉,程京甫. 不确定型AHP在单轨桥梁状态评估中的应用[J]. 北京交通大学学报,2010,34(6): 16-20. doi: 10.3969/j.issn.1673-0291.2010.06.004
ZHANG Cairan, ZHU Eryu, CHENG Jingfu. Application of uncertain type of AHP on monorail bridge condition assessment[J]. Journal of Beijing Jiaotong University, 2010, 34(6): 16-20. doi: 10.3969/j.issn.1673-0291.2010.06.004
|
|
中华人民共和国交通运输部. 公路桥梁加固设计规范: JTG/T J22—2008[S]. 北京: 人民交通出版社, 2008
|
|
中华人民共和国交通部. 公路桥涵养护规范: JTG H1l—2004[S]. 北京: 人民交通出版社, 2004
|
|
中华人民共和国交通运输部. 公路桥梁技术状况评定标准: JTG/T H21—2011[S]. 北京: 人民交通出版社, 2011
|
|
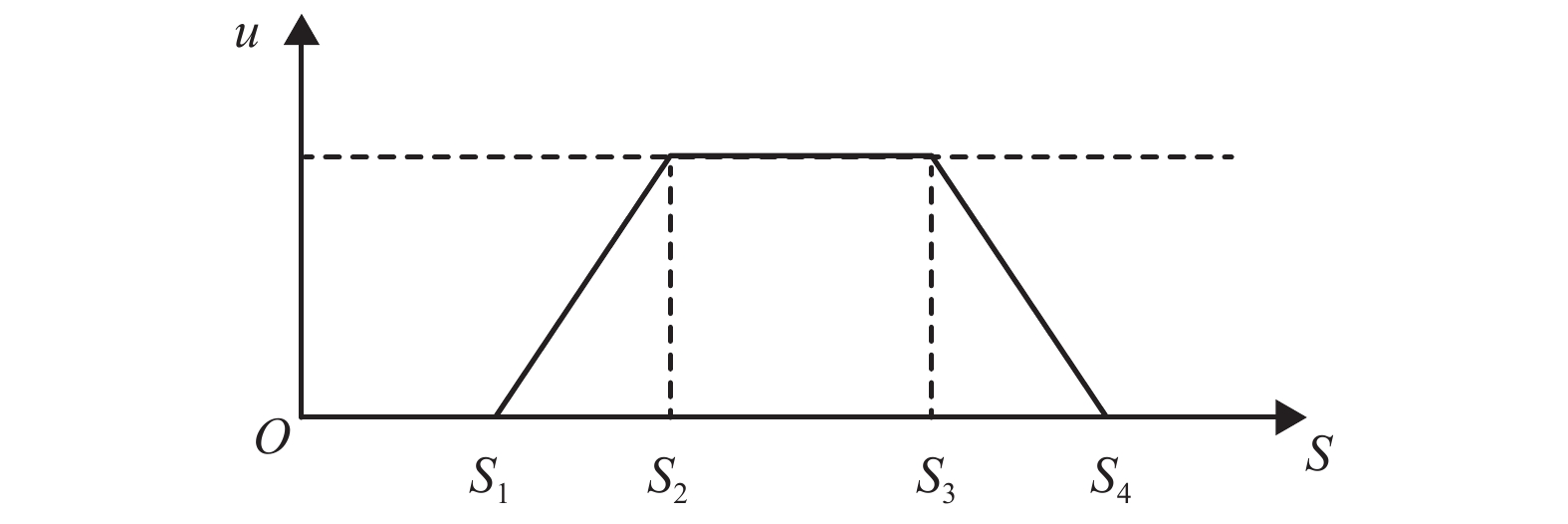
刘俊娟,王炜,程琳. 基于梯形隶属函数的区间数模糊评价方法[J]. 系统工程与电子技术,2009,31(2): 390-392. doi: 10.3321/j.issn:1001-506X.2009.02.032
LIU Junjuan, WANG Wei, CHENG Lin. Interval number fuzzy evaluation based on trapezoid subordinate function[J]. Systems Engineering and Electronics, 2009, 31(2): 390-392. doi: 10.3321/j.issn:1001-506X.2009.02.032
|
|
潘仁飞,邹乐乐,侯运炳. 基于专家可信度的不确定型AHP方法及其应用[J]. 系统工程,2008,26(10): 101-106. doi: 10.3969/j.issn.1001-4098.2008.10.020
PAN Renfei, ZOU Lele, HOU Yunbing. The method of uncertain AHP based on expert credibility and Its application[J]. Systems Engineering, 2008, 26(10): 101-106. doi: 10.3969/j.issn.1001-4098.2008.10.020
|
|
许先云,杨永清. 不确定AHP判断矩阵的一致性逼近与排序方法[J]. 系统工程理论与实践,1998,18(2): 19-22. doi: 10.3321/j.issn:1000-6788.1998.02.004
XU Xianyun, YANG Yongqing. The consistency approximation and weight calculation method of the judgement matrix in the uncertain type of AHP[J]. Systems Engineering-Theory & Practice, 1998, 18(2): 19-22. doi: 10.3321/j.issn:1000-6788.1998.02.004
|
|
张吉军. 区间数的排序方法研究[J]. 运筹与管理,2003,12(3): 18-22. doi: 10.3969/j.issn.1007-3221.2003.03.005
ZHANG Jijun. Research on method for ranking interval numbers[J]. Operations Research and Management Science, 2003, 12(3): 18-22. doi: 10.3969/j.issn.1007-3221.2003.03.005
|
|
徐泽水. 模糊互补判断矩阵排序的一种算法[J]. 系统工程学报,2001,16(4): 311-314. doi: 10.3969/j.issn.1000-5781.2001.04.012
XU Zeshui. Algorithm for priority of fuzzy complementary judgement matrix[J]. Journal of Systems Engineering, 2001, 16(4): 311-314. doi: 10.3969/j.issn.1000-5781.2001.04.012
|
Figures(1) / Tables(7)



 DownLoad:
DownLoad: