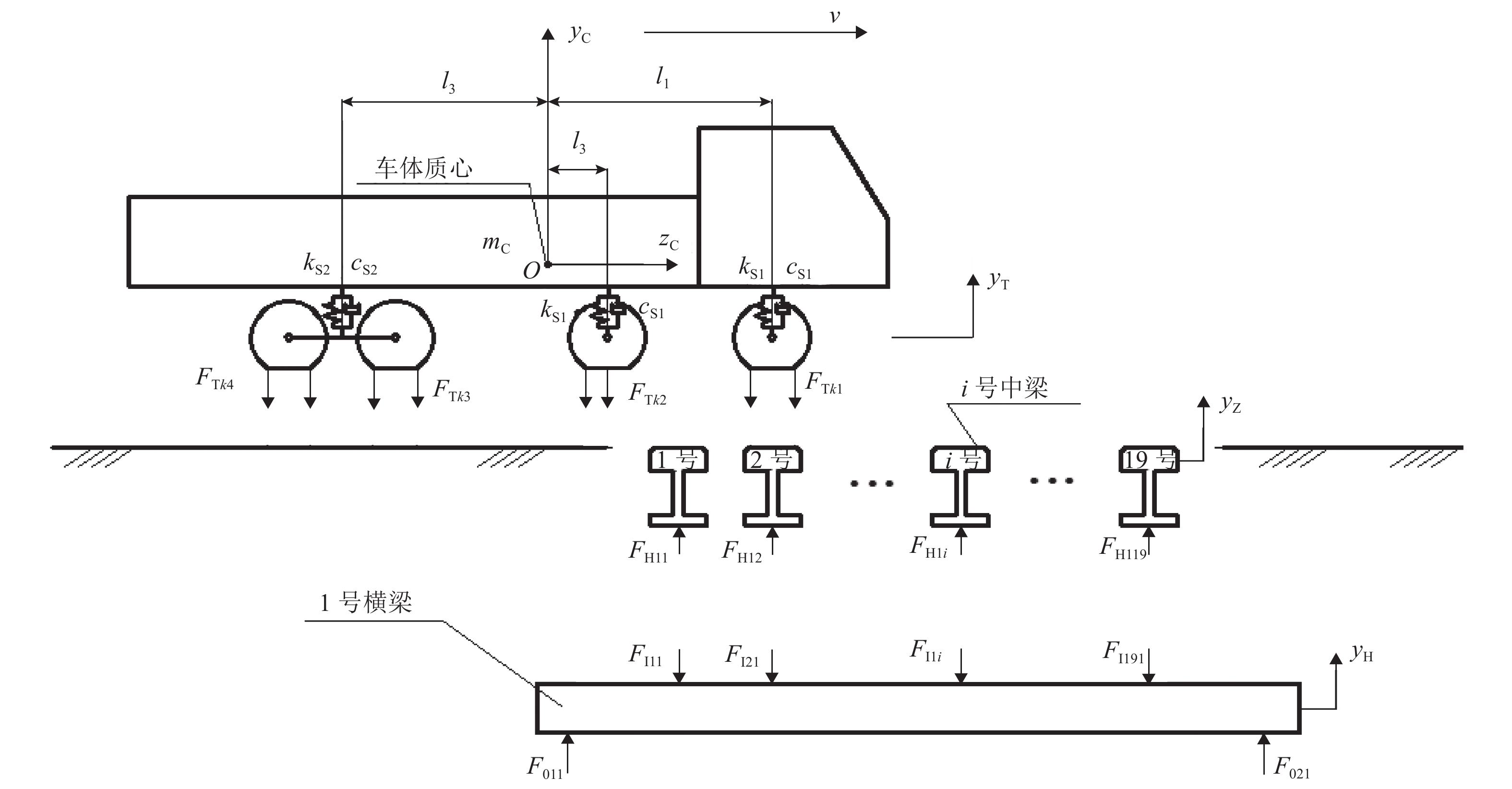
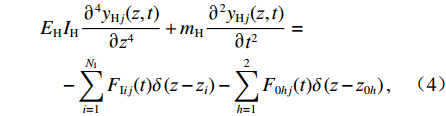
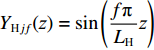
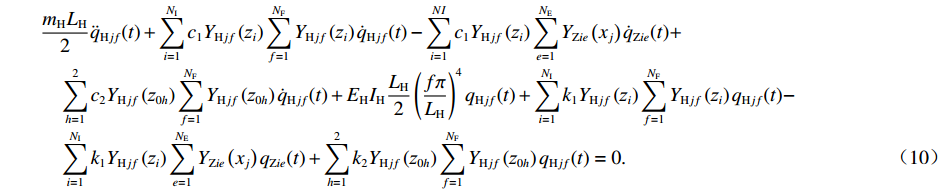
ZHANG Lu, LI Bing, WANG Shaohua, LI Huaixian. Numerical Simulation Method for Vertical Vibration of Heavy Vehicle-Expansion Joint Coupled System[J]. Journal of Southwest Jiaotong University, 2022, 57(5): 1032-1039. doi: 10.3969/j.issn.0258-2724.20200712
Citation:
WANG Qi, LIAO Haili, LI Mingshui, MA Cunming. Aerodynamic Stability of Long-Span Bridges in Post Flutter[J]. Journal of Southwest Jiaotong University, 2013, 26(6): 983-988. doi: 10.3969/j.issn.0258-2724.2013.06.003
ZHANG Lu, LI Bing, WANG Shaohua, LI Huaixian. Numerical Simulation Method for Vertical Vibration of Heavy Vehicle-Expansion Joint Coupled System[J]. Journal of Southwest Jiaotong University, 2022, 57(5): 1032-1039. doi: 10.3969/j.issn.0258-2724.20200712
Citation:
WANG Qi, LIAO Haili, LI Mingshui, MA Cunming. Aerodynamic Stability of Long-Span Bridges in Post Flutter[J]. Journal of Southwest Jiaotong University, 2013, 26(6): 983-988. doi: 10.3969/j.issn.0258-2724.2013.06.003
To provide reasonable explanations for the motion types of girder in post flutter status of long-span bridges, the nonlinear aerodynamic stability of bridge girder was analyzed based on an existing nonlinear motion-induced aerodynamic force (MIAF) model and the nonlinear vibration differential equation, by using the 4th Runge-Kutta algorithm. Four typical MIAF cases of streamline box girder with large vibration amplitudes were taken into account in the analysis. The results show that different types of motions would occur to the girder of long-span bridge in post flutter under conditions of different amplitudes and reduced velocities. The vibration of bridge girder will converge when the aerodynamic work is negative only or the negative work is larger than the positive one. The divergent motion will occur when the aerodynamic work is positive only or the positive work is larger than the negative one. If the aerodynamic positive and negative work are well matched to each other, the girder vibration will converge slowly because of the structural damping. If the aerodynamic positive energy is equal to that consumed by structure in the same period, an equal-amplitude vibration will occur. The motion of bridge girder could diverge if ignoring the nonlinear items of the motion-induced aerodynamic force.
BHM V F. Berechnugn nichtlinearer aerodynamisch erregter schwingungen von Hangebrcken
[J]. Der Stahlbau, 1967, 7: 207-215.
STEINMANN D G. Hangebrcken-Das aerodynamicsche problem und seine lsung
PICCARDO G. A methodology for the study of coupled aeroelastic phenomena
XU Xu, CAO Zhiyuan. Linear and nonlinear aerodynamic theory of interaction between flexible structure and wind
[J]. Acier-Steel-Stahl, 1954, 19(10/11): 495-542.
CHEN Airong, MA Rujin. Self-excited force model and parameter identification for soft flutter
[J]. Journal of Wind Engineering and Industrial Aerodynamics, 1993, 48: 241-252.
Den HARTOG J P. Transmission line vibration due to sleet
Den HARTOG J P. Mechanical vibrations
PARKINSON G V, SMITH J D. The square prism as an aeroelastic nonlinear oscillator. Quart
[J]. Applied Mathematics and Mechanics, 2002, 22(12): 57-65.
NOVAK M, Aeroelastic galloping of prismatic bodies
[C]//Proceedings of the International Conference of Wind Engineering. Amsterdam:
DIANA G, RESTA F, ROCCHI F, et al. Aerodynamic hysteresis: wind tunnel tests and numerical implementation of a fully nonlinear model for the bridge aeroelastic forces
DIANA G, ROCCHI D, ARGENTINi T, et al. Aerodynamic instability of a bridge deck section model Linear and nonlinear approach to force modeling
[s.n.], 2011: 10-15
LIAO Haili, SUO Qifeng, WANG Qi, et al. Study on the empirical mathematical model of nonlinear motion-induced aerodynamic force of bridge girder
王骑, 廖海黎, 李明水, 等. 桥梁断面非线性自激气动力经验模型
[J]. Transaction of AIEE, 1932, 51(4): 1074-1086.
LIAO Haili, WANG Qi, LI Mingshui, et al. Aerodynamic hysteresis effects of thin airfoil and streamline box girder under large amplitude oscillation
王骑, 廖海黎, 李明水, 等. 大振幅条件下薄翼和流线型箱梁的气动迟滞特性研究
[M]. New York: Dover Publications, 1985: 299-305.
[J]. Journal of Mechanics Application and Mathematics, 1964, 17: 225-239.
[J]. ASCE Journal of Engineering Mechanism, 1969, 96: 115-142.
[C]//Proceedings of the 4th International Conference on Advance in Wind and Structural. Jeju:
[s.n.], 2008: 944-960.
[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2010, 98: 363-374.
[C]//Proceedings of the BBAA 7. Shanghai:
[s.n.], 2012: Paper 033.
[J]. 西南交通大学学报, 2013, 48(2): 271-277. WANG Qi, LIAO Haili, LI Mingshui, et al. Empirical mathematical model of nonlinear motion-induced aerodynamic force of bridge girder
[J]. Journal of Southwest Jiaotong University, 2013, 48(2): 271-277.
[C]//Proceedings of the International Conference of Wind Engineering. Amsterdam:, 2011: Paper 539.
[J]. 实验流体力学, 2013, 21(1): 31-37. WANG Qi, LIAO Haili, LI Mingshui, et al. Aerodynamic hysteresis of thin airfoil and streamline box girder under large amplitude oscillation
[J]. Journal of Experiments in Fluid Mechanics, 2013, 21(1): 31-37.
ZHANG Lu, LI Bing, WANG Shaohua, LI Huaixian. Numerical Simulation Method for Vertical Vibration of Heavy Vehicle-Expansion Joint Coupled System[J]. Journal of Southwest Jiaotong University, 2022, 57(5): 1032-1039. doi: 10.3969/j.issn.0258-2724.20200712
ZHANG Lu, LI Bing, WANG Shaohua, LI Huaixian. Numerical Simulation Method for Vertical Vibration of Heavy Vehicle-Expansion Joint Coupled System[J]. Journal of Southwest Jiaotong University, 2022, 57(5): 1032-1039. doi: 10.3969/j.issn.0258-2724.20200712



 下载:
下载:





























 DownLoad:
DownLoad: